
SLIDE 1
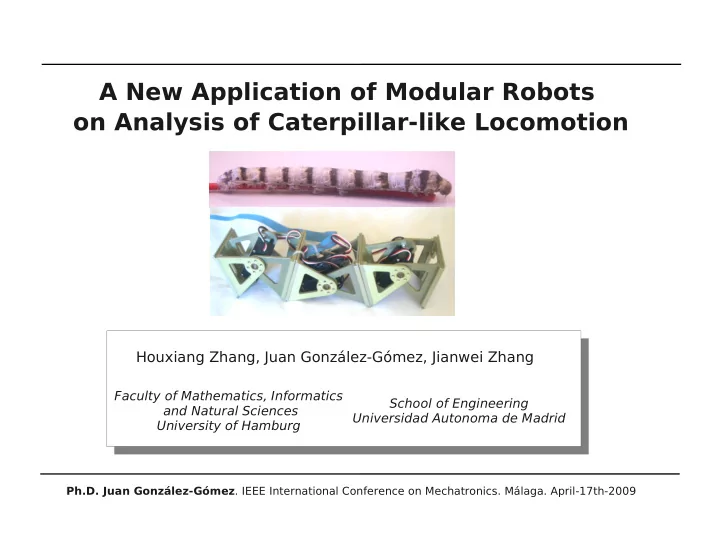
A New Application of Modular Robots
- n Analysis of Caterpillar-like Locomotion
Houxiang Zhang, Juan González-Gómez, Jianwei Zhang
Ph.D. Juan González-Gómez. IEEE International Conference on Mechatronics. Málaga. April-17th-2009