
SLIDE 1
Class of
Computer Networks M
Antonio Corradi Academic year 2015/2016 Group issues and policies
University of Bologna Dipartimento di Informatica – Scienza e Ingegneria (DISI) Engineering Bologna Campus
Groups issues & policies 1
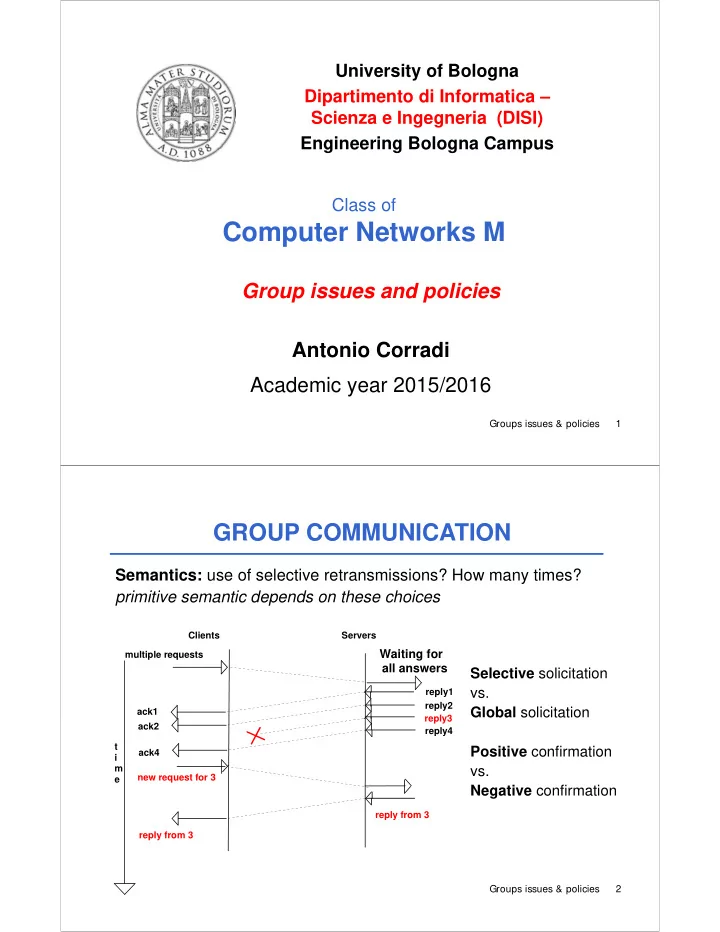
Semantics: use of selective retransmissions? How many times? primitive semantic depends on these choices
GROUP COMMUNICATION
Waiting for
Servers t i m e Clients multiple requests
all answers
ack1 ack2 ack4 new request for 3 reply from 3 reply from 3 reply1 reply2 reply3 reply4
Selective solicitation vs. Global solicitation Positive confirmation vs. Negative confirmation
Groups issues & policies 2