
CS4100 Outline
- We
We’re re done
- ne with
h Part art I: Search earch and and Planni anning ng!
- Part II: Probabilist
stic Reaso soning
- Diagnosi
sis
- Spe
Speech r recogn gniti tion
- Tracki
king objects
- Ro
Robot mapping
- Ge
Geneti tics
- Er
Error c correcti ting c g code des
- …
… lots s more!
- Pa
Part III: Machine Learning
CS 4100: Artificial Intelligence Probability
Jan-Willem van de Meent, Northeastern University
[These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.]
Today
- Pr
Proba babi bility
- Ra
Random Variables
- Jo
Joint and Marginal Dist stributions
- Conditional Dist
stribution
- Product Rule, Chain Rule, Baye
yes’ s’ Rule
- In
Infe ference
- In
Inde depe pende dence
- Yo
You’ll need d all this s st stuff A LOT fo for th the next xt few weeks, ks, so so make ke su sure yo you go go
- ve
ver it now!
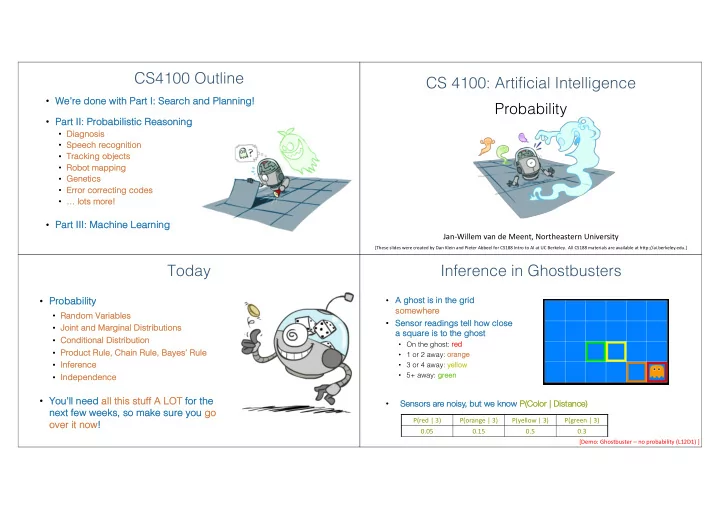
Inference in Ghostbusters
- A ghost
st is s in the grid so somewhere
- Senso
sor readings s tell how close se a sq square is s to the ghost st
- On the ghost: re
red
- 1 or 2 away: or
- rang
ange
- 3 or 4 away: ye
yellow
- 5+ away: gr
green P(red | 3) P(orange | 3) P(yellow | 3) P(green | 3) 0.05 0.15 0.5 0.3
- Sensors are noisy, but we kn
know P( P(Color | Distance)
[Demo: Ghostbuster – no probability (L12D1) ]