
Xiaorui Wang Feedback Control Theory from a Computer System Perspective 1
CSE 520S
Feedback Control Theory
- A Tutorial from Computer System’s Perspective
Xiaorui Wang Washington University in St. Louis
10/17/2005
2005-10-24 Control Tutorial -- Xiaorui Wang 2
Outline
Introduction
What is feedback control? Why feedback control?
Control design methodology
System modeling Performance specs/metrics Controller design
Summary
2005-10-24 Control Tutorial -- Xiaorui Wang 3
What Is Feedback Control?
Definition
Applying input to cause the system variable to conform to a desired value called the reference.
Everyday examples
Car cruise-control: gas input speed=60 mph Air Conditioning: power input temperature = 80 F
2005-10-24 Control Tutorial -- Xiaorui Wang 4
Traditionally: Open-Loop Control
What if no cruise control is on your car?
Control the gas by looking at the speed meter?
You are the controller!
Open-loop
Don’t look at the meter at all and try to maintain 60mph Need to estimate everything accurately
Road friction, ramp angle, traffic condition Precise computation to decide how much gas is necessary
Open-loop control fails because
We don’t know everything We make errors in estimation/modeling Things change
2005-10-24 Control Tutorial -- Xiaorui Wang 5
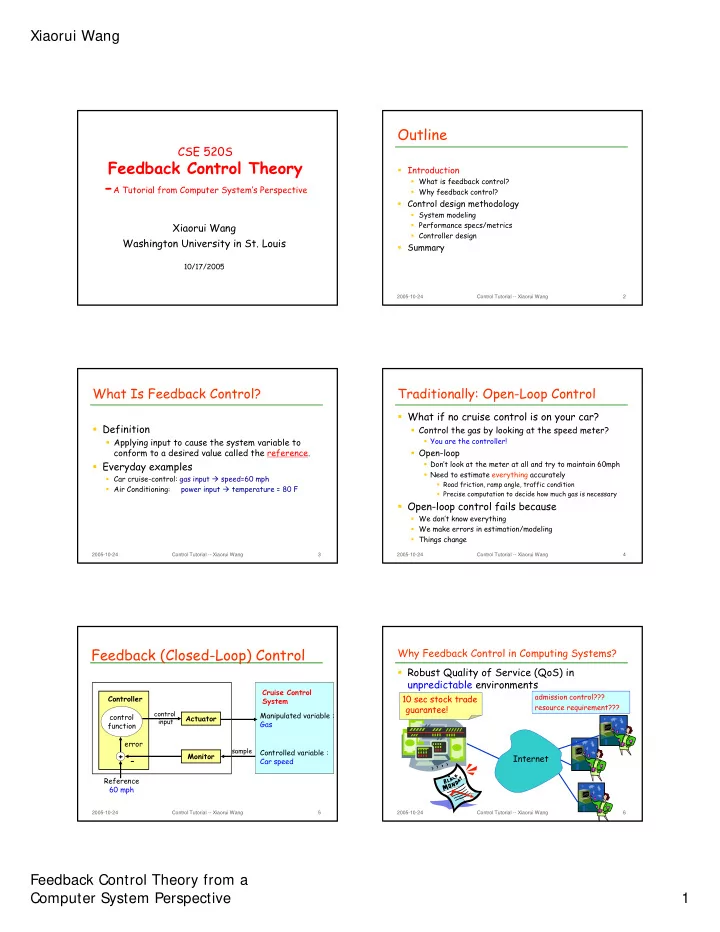
Feedback (Closed-Loop) Control
Actuator Monitor Reference 60 mph
control input
Controlled variable : Car speed Manipulated variable : Gas Cruise Control System
+ -
error control function Controller
sample
2005-10-24 Control Tutorial -- Xiaorui Wang 6
Why Feedback Control in Computing Systems? Robust Quality of Service (QoS) in unpredictable environments
10 sec stock trade guarantee! Internet
admission control??? resource requirement???