
SLIDE 1
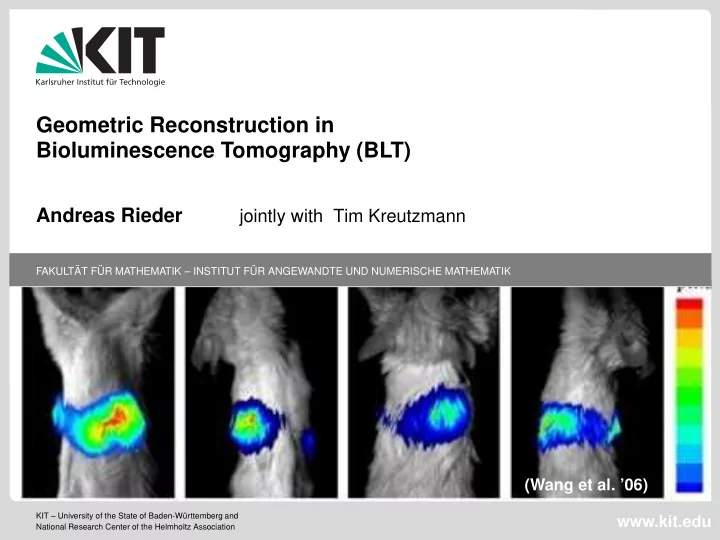
Geometric Reconstruction in Bioluminescence Tomography (BLT)
Andreas Rieder
jointly with Tim Kreutzmann
KIT – University of the State of Baden-W¨ urttemberg and National Research Center of the Helmholtz Association
FAKULT ¨ AT F ¨ UR MATHEMATIK – INSTITUT F ¨ UR ANGEWANDTE UND NUMERISCHE MATHEMATIK