
10/23/15 1
CSE-‑571 ¡ Probabilis1c ¡Robo1cs ¡ ¡ Gaussian ¡Processes ¡for ¡ Bayesian ¡Filtering ¡
Dieter ¡Fox ¡ University ¡of ¡Washington ¡
¡
1 ¡ Amazon ¡ Dieter ¡Fox: ¡GP-‑BayesFilters ¡
s(k)
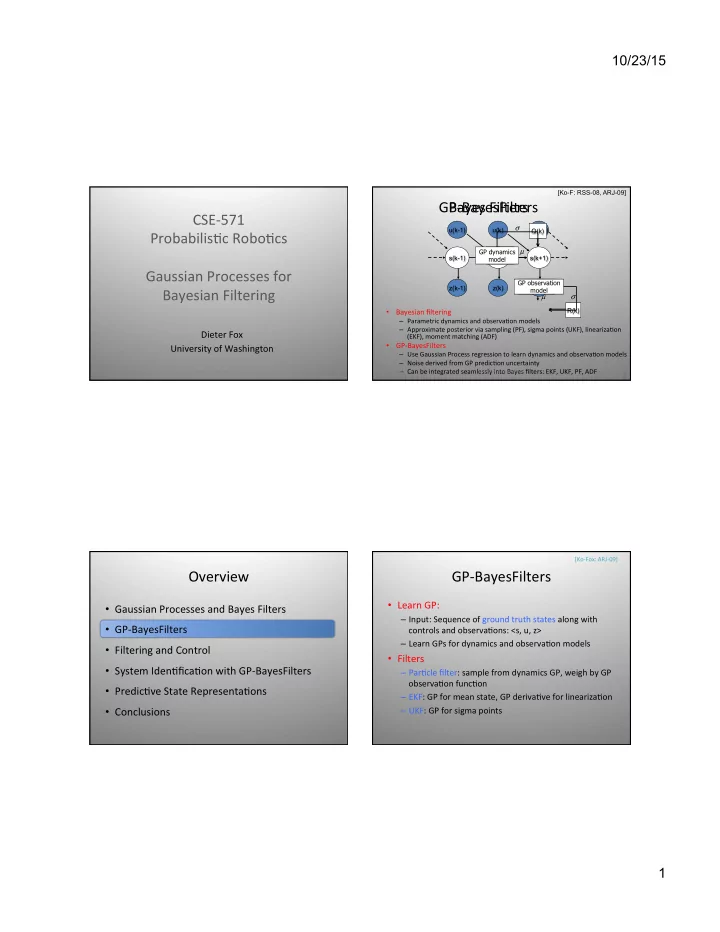
- Bayesian ¡filtering ¡
– Parametric ¡dynamics ¡and ¡observa1on ¡models ¡ – Approximate ¡posterior ¡via ¡sampling ¡(PF), ¡sigma ¡points ¡(UKF), ¡lineariza1on ¡ (EKF), ¡moment ¡matching ¡(ADF) ¡
- GP-‑BayesFilters ¡
– Use ¡Gaussian ¡Process ¡regression ¡to ¡learn ¡dynamics ¡and ¡observa1on ¡models ¡ – Noise ¡derived ¡from ¡GP ¡predic1on ¡uncertainty ¡ – Can ¡be ¡integrated ¡seamlessly ¡into ¡Bayes ¡filters: ¡EKF, ¡UKF, ¡PF, ¡ADF ¡
2 ¡
Bayes ¡Filters ¡
Dynamics model Observation model u(k-1) s(k-1) z(k) z(k-1) u(k) u(k+1) s(k+1) z(k+1) Q(k) R(k) GP dynamics model GP observation model
µ σ µ σ
[Ko-F: RSS-08, ARJ-09]
GP-‑BayesFilters ¡
Amazon ¡ Dieter ¡Fox: ¡GP-‑BayesFilters ¡
Overview ¡
- Gaussian ¡Processes ¡and ¡Bayes ¡Filters ¡
- GP-‑BayesFilters ¡
- Filtering ¡and ¡Control ¡
- System ¡Iden1fica1on ¡with ¡GP-‑BayesFilters ¡
- Predic1ve ¡State ¡Representa1ons ¡
- Conclusions ¡
Amazon ¡ Dieter ¡Fox: ¡GP-‑BayesFilters ¡ 3 ¡
GP-‑BayesFilters ¡
- Learn ¡GP: ¡ ¡
– Input: ¡Sequence ¡of ¡ground ¡truth ¡states ¡along ¡with ¡ controls ¡and ¡observa1ons: ¡<s, ¡u, ¡z> ¡ – Learn ¡GPs ¡for ¡dynamics ¡and ¡observa1on ¡models ¡
- Filters ¡
– Par1cle ¡filter: ¡sample ¡from ¡dynamics ¡GP, ¡weigh ¡by ¡GP ¡
- bserva1on ¡func1on ¡
– EKF: ¡GP ¡for ¡mean ¡state, ¡GP ¡deriva1ve ¡for ¡lineariza1on ¡ – UKF: ¡GP ¡for ¡sigma ¡points ¡
Amazon ¡ Dieter ¡Fox: ¡GP-‑BayesFilters ¡ 4 ¡
[Ko-‑Fox: ¡ARJ-‑09] ¡