SLIDE 16
- R. Osofsky | Magnetic Field Status of the Muon g-2 Experiment
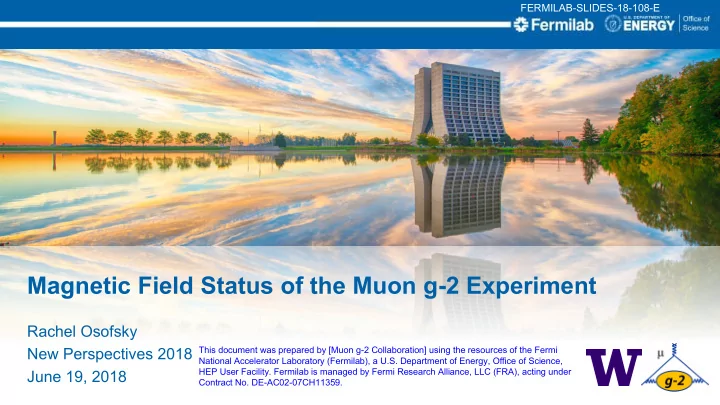
Passive Shimming
16
1600
1
I 2
3 • 4
I 5 I 7 I 8
9
I 1Q I 11
12 13 I 14 15 I 17 18 I 19 I 20
21 I 22 I 23
24 I 25 I 26 27 I 28 I 29 30 I 31 I 32 33 34 I 35 36 I
1400A
I
B
I
: C
I D I
E
I I G
H
I I I I I J I
I K I
L
I I I I I I I I I
I
I I I I I I I I I I I I I I
I I I I I I I I I I I
I\: .
I I
I
I I I I I I I I
I I I I I I I I I I I I
t .
I I I I I I I I
I
f
I I I I I I I I I I I I I I
\
I I I I I
I
\
Q)
800
I I I I
I I I I I I I I I I
Cl.
I I I I
I
I
I I I I
I I I
I
,
I
·-
I I I I I I I I I
600
I I I I I
I I I I I I I I I I
I I I
I I I
I I I I I
r
I I I I I I
I I I I
I I
I I I I
400
I I I
I
I I I I I
I
I I I I I
.. .
I
(.,
I I I I I I I I I I I I I I I I I I
I I I I I I I I I I I I I I I
\,
I I
200
I
100 150 200 250 300 350
0 [deg]
Nov 2015
Jan 2016
Mar 2016 May 2016
Jul2016 Sep 2016
UNIVERSITY of WASHINGTON