
SLIDE 1
Non-Iterative, Feature-Preserving Mesh Smoothing Thouis R. Jones - - PowerPoint PPT Presentation
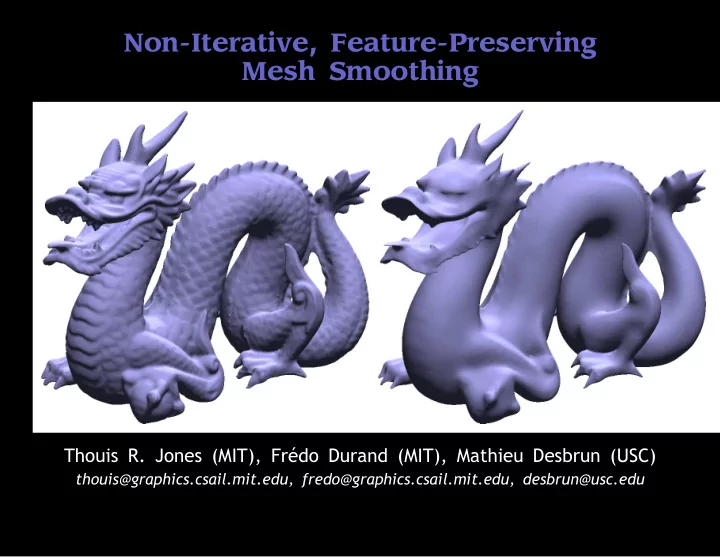
Non-Iterative, Feature-Preserving Mesh Smoothing Thouis R. Jones (MIT), Frdo Durand (MIT), Mathieu Desbrun (USC) thouis@graphics.csail.mit.edu, fredo@graphics.csail.mit.edu, desbrun@usc.edu Why Smooth? 3D scanners are noisy... Jones, Durand,
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
1 2 3 4 y –2 –1 1 2 x
Jones, Durand, Desbrun
0.05 0.1 0.15 0.2 0.25 0.3 y –2 –1 1 2 x
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun
Jones, Durand, Desbrun