
SLIDE 1
1/24
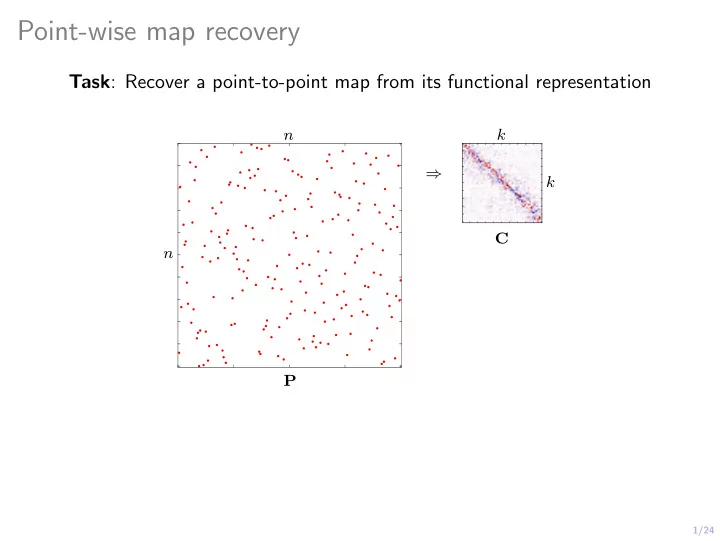
Point-wise map recovery Task : Recover a point-to-point map from its - - PowerPoint PPT Presentation
Point-wise map recovery Task : Recover a point-to-point map from its functional representation n k k C n P 1/24 Point-wise map recovery Task : Recover a point-to-point map from its functional representation n k k rank( C )
1/24
1/24
1/24
2/24
2/24
2/24
2/24
2/24
3/24
N PΦM
Π∈{0,1}n×n −Π, ΦN CΦ⊤ M
3/24
N PΦM
Π∈{0,1}n×n CΦ⊤ M − Φ⊤ N Π2 F
3/24
N PΦM
Π∈{0,1}n×n CΦ⊤ M − Φ⊤ N Π2 F
i (x) (a column of Φ⊤ M)
M
3/24
N PΦM
Π∈{0,1}n×n CΦ⊤ M − Φ⊤ N Π2 F
i (x) (a column of Φ⊤ M)
M
M and Φ⊤ M in the ℓ2 sense
3/24
N PΦM
Π∈{0,1}n×n CΦ⊤ M − Φ⊤ N Π2 F
i (x) (a column of Φ⊤ M)
M
M and Φ⊤ M in the ℓ2 sense
3/24
N PΦM
Π∈{0,1}n×n CΦ⊤ M − Φ⊤ N Π2 F
i (x) (a column of Φ⊤ M)
M
M and Φ⊤ M in the ℓ2 sense
4/24
P∈{0,1}n×m CΦ⊤ M − Φ⊤ N P2 F
4/24
P∈{0,1}n×m CΦ⊤ M − Φ⊤ N P2 F
M
N
5/24
5/24
P∈{0,1}n×m C∗Φ⊤ M − Φ⊤ N P2 F
5/24
P∈{0,1}n×m C∗Φ⊤ M − Φ⊤ N P2 F
C∈Rk×k CΦ⊤ M − Φ⊤ N P∗2 F
6/24
P∈{0,1}n×m
M, Φ⊤ N P) + λ CΦ⊤ M − Φ⊤ N P2 Ω
6/24
P∈{0,1}n×m
M, Φ⊤ N P)
M − Φ⊤ N P2 Ω
6/24
P∈{0,1}n×m
M, Φ⊤ N P)
M − Φ⊤ N P2 Ω
Ω promotes smooth displacements
6/24
P∈{0,1}n×m
M, Φ⊤ N P)
M − Φ⊤ N P2 Ω
Ω promotes smooth displacements
6/24
P∈{0,1}n×m
M, Φ⊤ N P)
M − Φ⊤ N P2 Ω
Ω promotes smooth displacements
6/24
P∈{0,1}n×m
M, Φ⊤ N P)
M − Φ⊤ N P2 Ω
Ω promotes smooth displacements
7/24
7/24
7/24
8/24
Π∈{0,1}n×n trace(Π⊤KMP0K⊤ N )
M/σ2) and KN = exp(−D2 N /σ2)
8/24
Π∈{0,1}n×n trace(Π⊤KMP0K⊤ N )
M/σ2) and KN = exp(−D2 N /σ2)
8/24
Π∈{0,1}n×n trace(Π⊤KMP0K⊤ N )
M/σ2) and KN = exp(−D2 N /σ2)
8/24
Π∈{0,1}n×n trace(Π⊤KMP0K⊤ N )
M/σ2) and KN = exp(−D2 N /σ2)
8/24
Π∈{0,1}n×n trace(Π⊤KMP0K⊤ N )
M/σ2) and KN = exp(−D2 N /σ2)
8/24
Π∈{0,1}n×n trace(Π⊤KMP0K⊤ N )
M/σ2) and KN = exp(−D2 N /σ2)
8/24
Π∈{0,1}n×n trace(Π⊤KMP0K⊤ N )
M/σ2) and KN = exp(−D2 N /σ2)
9/24
1% 3% 5% 7% ×diam
9/24
1% 3% 5% 7% ×diam
10/24
11/24
12/24
13/24
14/24
14/24
14/24
14/24
14/24
15/24
16/24
17/24
17/24
17/24
17/24
17/24
(i,j)∈G CijAij − Bij2,1
18/24
18/24
18/24
18/24
18/24
18/24
18/24
19/24
19/24
20/24
20/24
21/24
21/24
22/24
23/24
23/24
23/24
23/24
23/24
23/24
24/24