
SLIDE 1
Supervisor - Task Given Process model, P Specification, K K - - PDF document
Department of Signals and Systems Supervisor - Task Given Process model, P Specification, K K Calculate supervisor S Within the spec ( ) ( ) L P S L P K P || S = S Non-blocking ( ) ( ) L P S L
Chalmers Automation Martin Fabian
m
u
Chalmers Automation Martin Fabian
u
m
Chalmers Automation Martin Fabian
u
m
Chalmers Automation Martin Fabian
Chalmers Automation Martin Fabian
Chalmers Automation Martin Fabian
Chalmers Automation Martin Fabian
Chalmers Automation Martin Fabian
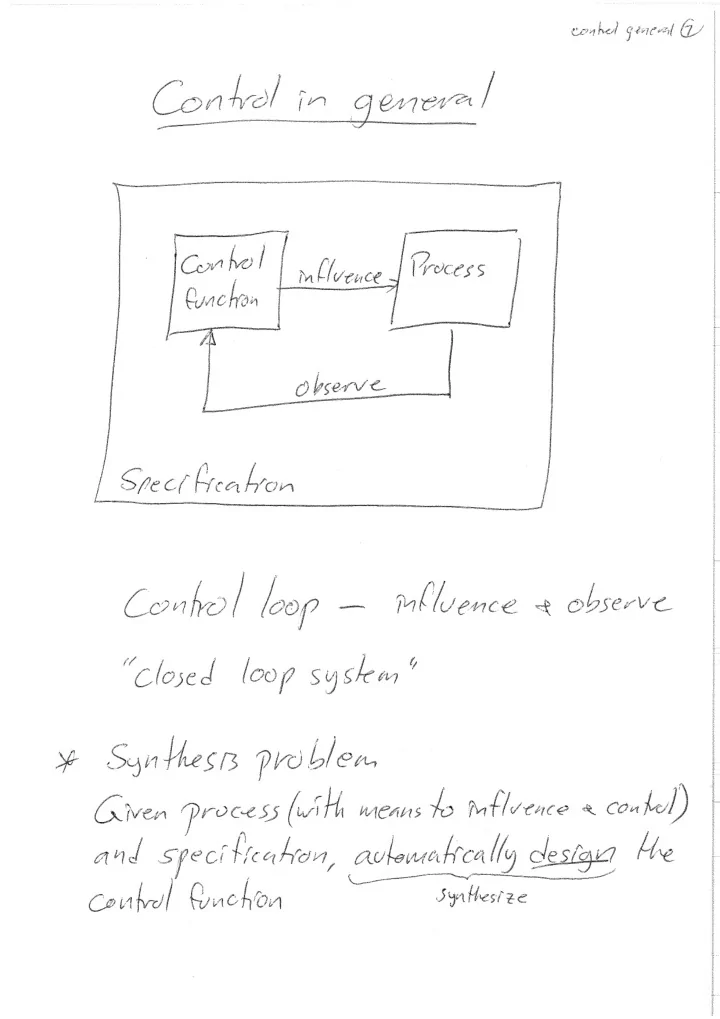
influence
S1 S2 S3S P2 P1 P3