
SLIDE 1
LIC-Based Regularization of Multi-Valued Images David Tschumperl - - PowerPoint PPT Presentation
LIC-Based Regularization of Multi-Valued Images David Tschumperl CNRS UMR 6072 (GREYC/ENSICAEN) - Image Team ICIP2005, Genova, 11-14 September 2005 Data Regularization Aim of regularization consists in transforming a noisy signal into a
∂I(x,y,t) ∂t
4t
i ∇Ii∇IT i
− + f2(λ+ + λ−) θ+θT +
1 1+sp
1 √1+sq
(x,y) = 1
−∞
(p)) dp
(0)
∂CX
(a)
∂a
(a))
(X) = αUθ.
(X) ≃ αUθ.
(X) ≃ ˜
(X)
(X)
−dtwθ
(X)
(X,a)) da dθ
(X,0)
∂Cθ ∂a (X, a)
(X,a)) = T(Cθ (X,a)) U(θ)
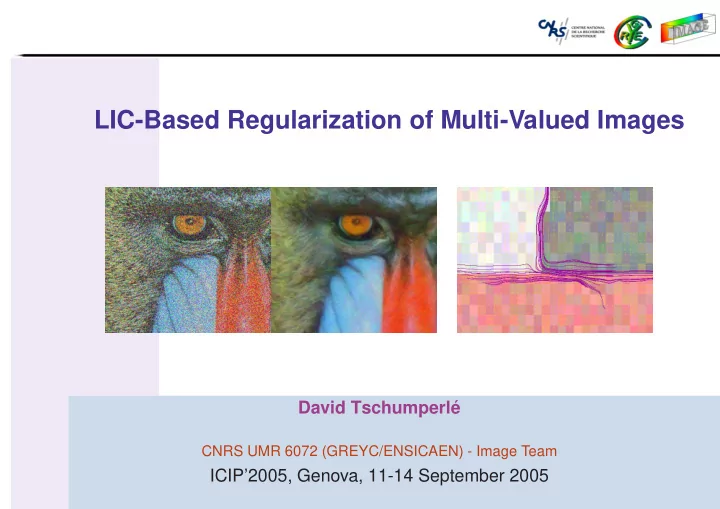
“Baboon” (detail) 512x512 (1 iter., 19s) “Tunisia” (detail) 555x367 (1 iter., 11s)
“Lena” (detail) 256x256 (1 iter., 6.4s) “Chris” (detail) 293x306 (1 iter., 5.6s)
“Penguin” (detail) 355x287 (1 iter., 12.8s) “Farm” (detail) 460x365 (1 iter., 26s)
“Parrot” 500x500 (200 iter., 4m11s) “Owl” 320x246 (10 iter., 1m01s)
(a) Original color image (b) Bloc interpolation (b) Linear interpolation (b) Bicubic interpolation (b) PDE-based interpolation
“Nude” (1 iter., 20s) “Forest” (1 iter., 5s)