
SLIDE 1
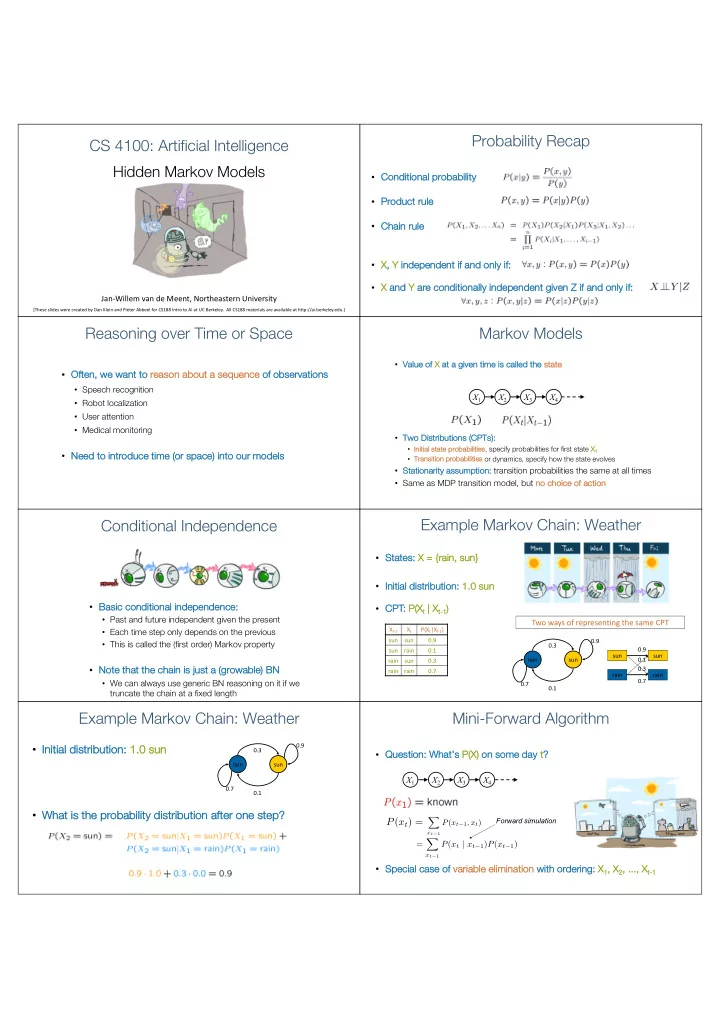
CS 4100: Artificial Intelligence Hidden Markov Models
Jan-Willem van de Meent, Northeastern University
[These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.]
Probability Recap
- Co
Conditional probability
- Pr
Product rule
- Ch
Chain rule
- X,
, Y in independent if if and only ly if if:
- X an
and Y ar are co e conditional ally i indep epen enden ent g given en Z Z i if an and o
- nly i
if:
Reasoning over Time or Space
- Oft
Often, we we wa want to re reason
- n abou
bout a sequ quence of
- f obs
- bserv
rvation
- ns
- Speech recognition
- Robot localization
- User attention
- Medical monitoring
- Ne
Need to introduce time me (or sp space) into our mo models
Markov Models
- Va
Value of X at at a a given en time e is cal called ed the e st state
- Tw
Two
- Distr
tributi tion
- ns (CPTs
Ts):
- In
Initial s state p probabilities, specify probabilities for first state X1
- Tra
ransiti tion pr proba babi bilities or dynamics, specify how the state evolves
- St
Stationarity as assumption: transition probabilities the same at all times
- Same as MDP transition model, but no
no cho hoice of action X2 X1 X3 X4
Conditional Independence
- Ba
Basic ic condit itio ional l in independence:
- Past and future independent given the present
- Each time step only depends on the previous
- This is called the (first order) Markov property
- No
Note that the chain is s just st a (grow growabl ble) ) BN
- We can always use generic BN reasoning on it if we
truncate the chain at a fixed length
Example Markov Chain: Weather
- St
States: X X = {ra {rain, sun}
- In
Initial di distri ribu bution
- n: 1.
1.0 0 sun
rain sun 0.9 0.7 0.3 0.1
Two ways of representing the same CPT
sun rain sun rain 0.1 0.9 0.7 0.3 Xt-1 Xt P(Xt|Xt-1) sun sun 0.9 sun rain 0.1 rain sun 0.3 rain rain 0.7
- CP
CPT: P( P(Xt | | Xt-1)
Example Markov Chain: Weather
- In
Initi tial al di distr tribu buti tion: 1. 1.0 0 sun
- Wh
What i is t s the p probability d dist stribution a after o
- ne st
step?
rain sun 0.9 0.7 0.3 0.1
Mini-Forward Algorithm
- Qu
Question: What’s s P( P(X) on
- n some
- me da
day t?
- Sp
Special case of f va variable elimination wi with ordering: X1, X , X2, ..., X , ..., Xt-1
Forward simulation
X2 X1 X3 X4
P(xt) =
X
xt−1
P(xt−1, xt) = X
xt−1